
Naviguer dans le monde des moteurs brushless peut être déroutant. CC sans balais (BLDC) et moteurs synchrones à aimants permanents (PMSM) Bien que tous deux sans balais, ils sont différents. Comprendre leurs principales différences est essentiel pour choisir le moteur adapté à votre application.
La principale distinction réside dans leur conception et dans la manière dont ils sont contrôlés.
1. Contre-EMF : la différence fondamentale
La différence la plus importante entre ces deux types de moteurs est la forme de leur Force contre-électromotrice (BEMF)Il s’agit de la tension générée par le moteur lorsqu’il tourne.
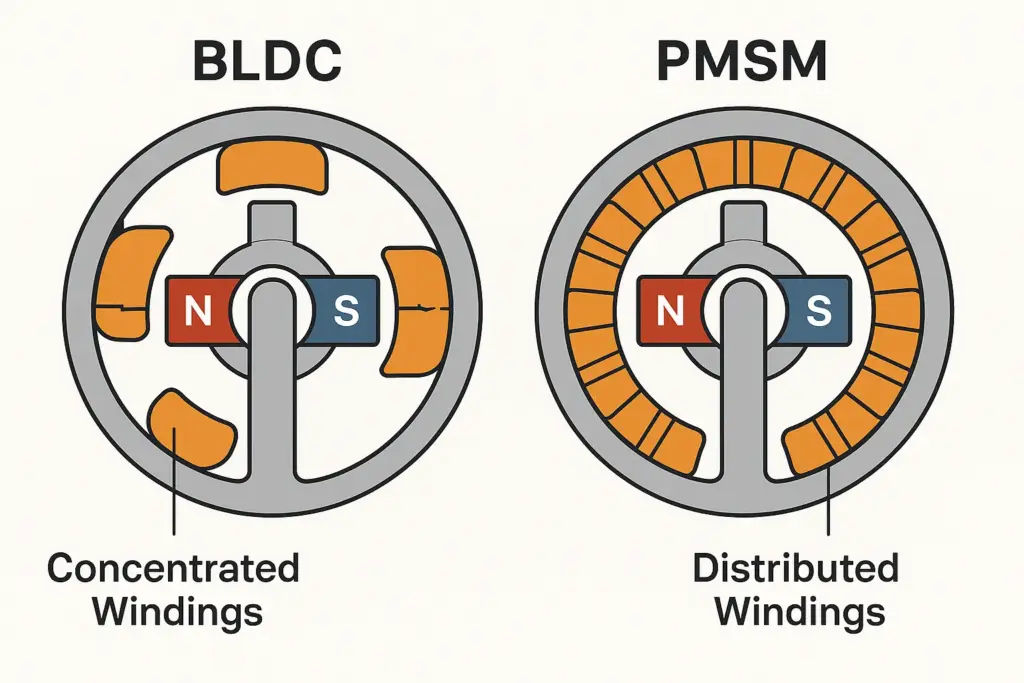
- Moteurs BLDC sont conçus pour avoir un force de coupure trapézoïdale Forme d'onde. Cette forme est créée par un champ magnétique presque uniforme sur chaque pôle.
- Moteurs PMSM sont conçus pour avoir un force électromotrice sinusoïdale Forme d'onde. Ceci est obtenu grâce à une conception de champ magnétique plus complexe, qui varie en douceur selon chaque pôle.
Cette différence unique détermine le type de contrôle, les performances et le cas d’utilisation optimal pour chaque moteur.
2. Stratégie de contrôle : simple ou précise
La forme d'onde BEMF détermine directement la manière la plus efficace de piloter le moteur.
- Contrôle BLDC : En raison de sa force BEMF trapézoïdale, un moteur BLDC est contrôlé plus efficacement avec commutation trapézoïdale (ou à six étapes)Le contrôleur commute le courant entre les phases du moteur selon une séquence simple, étape par étape. Cette méthode de contrôle est facile à mettre en œuvre et économique, mais elle peut entraîner une ondulation de couple et un bruit plus importants.
- Contrôle PMSM : La force BEMF sinusoïdale d'un moteur PMSM est mieux contrôlée en utilisant Contrôle orienté champ (FOC)Cette méthode avancée utilise des algorithmes complexes pour ajuster en continu le courant en une onde sinusoïdale régulière. La technologie FOC offre un couple extrêmement régulier, un rendement élevé et un fonctionnement silencieux, mais elle nécessite un microprocesseur plus puissant et un capteur de position haute résolution.
3. Performances et applications
Bien que les deux moteurs soient excellents pour une large gamme de tâches, leurs caractéristiques distinctes les rendent mieux adaptés à différentes applications.
- Moteurs BLDC : Leur contrôle simple et leur densité de couple élevée en font un excellent choix pour applications sensibles aux coûts Là où la haute performance n'est pas la priorité absolue. On les retrouve souvent dans :
- Outils électriques
- Appareils électroménagers
- Véhicules et drones RC
- ventilateurs d'ordinateur
- Moteurs PMSM : Leur couple fluide, leur rendement élevé et leur contrôle précis sont idéaux pour applications de haute performance et de haute précisionIls sont couramment utilisés dans :
- Robotique et automatisation
- Véhicules électriques (VE)
- Pompes et compresseurs industriels
- Équipement médical
Conclusion
En résumé, le choix entre un moteur BLDC et un moteur PMSM dépend de vos besoins spécifiques. Si vous recherchez des performances simples, économiques et robustes, un moteur BLDC est probablement le meilleur choix. Si votre application exige une fluidité exceptionnelle, un rendement élevé et une grande précision, un moteur PMSM est la solution idéale.
Laisser un commentaire